BubbleRob tutorial <<
Previous Next >> External controller tutorial
Line following BubbleRob
由40723210提供
在本教程中,我們旨在擴展BubbleRob的功能,以使他/她遵循地面上的規則。確保您已完全閱讀並理解第一個BubbleRob教程。本教程由Eric Rohmer提供。
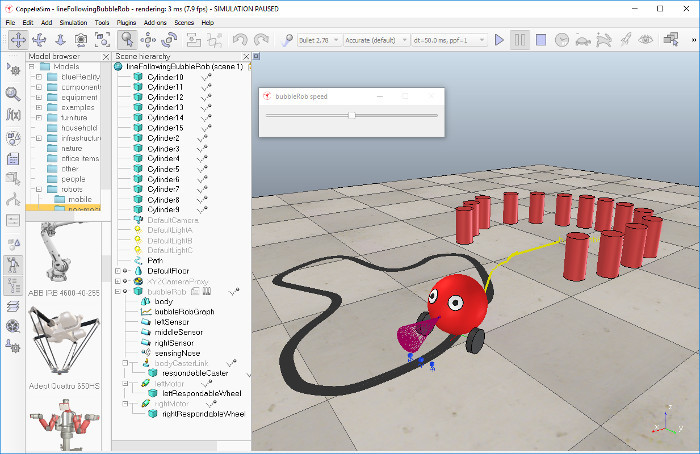
在CoppeliaSim的安裝文件夾中的tutorials / BubbleRob中加載第一個BubbleRob教程的場景。與本教程相關的場景文件位於tutorials / LineFollowingBubbleRob中。下圖說明了我們將設計的仿真場景:
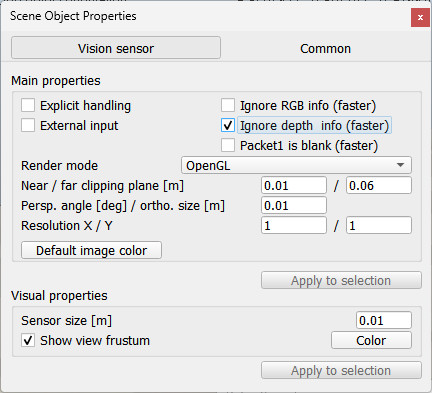
我們首先創建3個視覺傳感器中的第一個,並將其附加到bubbleRob對象。選擇[菜單欄->添加->視覺傳感器->正交類型]。雙擊場景層次結構中新創建的視覺傳感器圖標,編輯其屬性,然後更改參數以反映以下對話框:
視覺傳感器必鬚麵向地面,因此選擇它,然後在“ 方向”對話框的“ 方向”選項卡上,將“ Alpha - Beta - Gamma”項設置為[180; 0; 0] 。
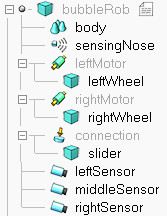
我們有幾種可能性可以讀取視覺傳感器。由於我們的視覺傳感器只有一個像素,並且操作簡單,因此我們只需查詢視覺傳感器讀取的圖像的平均強度值即可。對於更複雜的情況,我們可以設置視覺回調函數。現在,將視覺傳感器複製並粘貼兩次,並將其名稱調整為leftSensor,middleSensor和rightSensor。將bubbleRob設置為其父級(即將其附加到bubbleRob對象)。現在,您的傳感器在場景層次中應如下所示:
讓我們正確放置傳感器。對於使用位置對話框中,在位置選項卡,並設置以下的絕對坐標:
- 左傳感器:[0.2; 0.042; 0.018]
- 中間傳感器:[0.2; 0; 0.018]
- 右傳感器:[0.2; -0.042; 0.018]
現在讓我們修改環境。我們可以移去BubbleRob前面的幾個圓柱體。接下來,我們將構建機器人將嘗試遵循的路徑。現在最好切換到頂視圖:通過頁面選擇器工具欄按鈕選擇頁面 4 。然後單擊[菜單欄->添加->路徑->圓圈類型]。使用鼠標啟用對象移動。您可以通過兩種方式調整路徑的形狀:
- 選擇路徑(並且只有路徑)後,按住Ctrl並單擊其控制點之一。然後可以將它們拖動到正確的位置。
- 選擇路徑後,進入路徑編輯模式。在那裡,您可以靈活地調整各個路徑控制點。
對路徑的幾何形狀滿意(您隨時可以在以後的階段對其進行修改)後,選擇它,然後取消選中路徑屬性中的“ 顯示點的方向”,“ 顯示路徑線”和“ 顯示路徑上的當前位置”。然後單擊“ 顯示路徑整形對話框”。這將打開路徑整形對話框。單擊“ 啟用路徑整形”,將類型設置為“ 水平線段”,然後將“ 縮放比例”到4.0。最後將顏色調整為黑色。我們必須對路徑進行最後一個重要的調整:當前,路徑的z位置與地板的z位置重合。結果是有時我們會看到路徑,有時會看到地板(這種效果在openGl行話中被稱為“ z-fighting ”)。這不僅影響我們所看到的,而且還會影響視覺傳感器所看到的。為了避免與z戰鬥有關的問題,只需將路徑對象的位置向上移動0.5毫米即可。
最後一步是調整BubbleRob的控制器,使其也將遵循黑色路徑。打開附著於bubbleRob的子腳本,並將其替換為以下代碼:
function speedChange_callback(ui,id,newVal)
speed=minMaxSpeed[1]+(minMaxSpeed[2]-minMaxSpeed[1])*newVal/100
end
function sysCall_init()
-- This is executed exactly once, the first time this script is executed
bubbleRobBase=sim.getObjectAssociatedWithScript(sim.handle_self)
leftMotor=sim.getObjectHandle("leftMotor")
rightMotor=sim.getObjectHandle("rightMotor")
noseSensor=sim.getObjectHandle("sensingNose")
minMaxSpeed={50*math.pi/180,300*math.pi/180}
backUntilTime=-1 -- Tells whether bubbleRob is in forward or backward mode
floorSensorHandles={-1,-1,-1}
floorSensorHandles[1]=sim.getObjectHandle("leftSensor")
floorSensorHandles[2]=sim.getObjectHandle("middleSensor")
floorSensorHandles[3]=sim.getObjectHandle("rightSensor")
-- Create the custom UI:
xml = '<ui title="'..sim.getObjectName(bubbleRobBase)..' speed" closeable="false" resizeable="false" activate="false">'..[[
<hslider minimum="0" maximum="100" onchange="speedChange_callback" id="1"/>
<label text="" style="* {margin-left: 300px;}"/>
</ui>
]]
ui=simUI.reate(xml)
speed=(minMaxSpeed[1]+minMaxSpeed[2])*0.5
simUI.setSliderValue(ui,1,100*(speed-minMaxSpeed[1])/(minMaxSpeed[2]-minMaxSpeed[1]))
end
function sysCall_actuation()
result=sim.readProximitySensor(noseSensor)
if (result>0) then backUntilTime=sim.getSimulationTime()+4 end
-- read the line detection sensors:
sensorReading={false,false,false}
for i=1,3,1 do
result,data=sim.readVisionSensor(floorSensorHandles[i])
if (result>=0) then
sensorReading[i]=(data[11]<0.3) -- data[11] is the average of intensity of the image
end
print(sensorReading[i])
end
-- compute left and right velocities to follow the detected line:
rightV=speed
leftV=speed
if sensorReading[1] then
leftV=0.03*speed
end
if sensorReading[3] then
rightV=0.03*speed
end
if sensorReading[1] and sensorReading[3] then
backUntilTime=sim.getSimulationTime()+2
end
if (backUntilTime<sim.getSimulationTime()) then
-- When in forward mode, we simply move forward at the desired speed
sim.setJointTargetVelocity(leftMotor,leftV)
sim.setJointTargetVelocity(rightMotor,rightV)
else
-- When in backward mode, we simply backup in a curve at reduced speed
sim.setJointTargetVelocity(leftMotor,-speed/2)
sim.setJointTargetVelocity(rightMotor,-speed/8)
end
end
function sysCall_cleanup()
simUI.destroy(ui)
end
您可以輕鬆地調試以下視覺傳感器的生產線:選擇一個,然後在場景視圖中選擇[右鍵->添加->浮動視圖],然後在新添加的浮動視圖中選擇[右鍵->視圖- ->將視圖與選定的視覺傳感器關聯]。
最後,刪除在第一個BubbleRob教程中添加的輔助項:刪除圖像處理視覺傳感器及其關聯的浮動視圖,該浮動視圖表示障礙物的清除。通過距離對話框也刪除距離計算對象。而已!
BubbleRob tutorial <<
Previous Next >> External controller tutorial